



1 / 5
At present, most sanitary ceramic polishing processes use manual labor, which involves high physical harm, labor intensity, and significant dust exposure. Operators are prone to occupational diseases, and product quality is heavily influenced by human factors, making homogeneity difficult to guarantee.
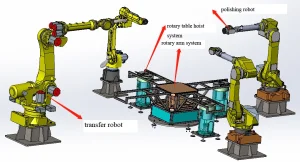
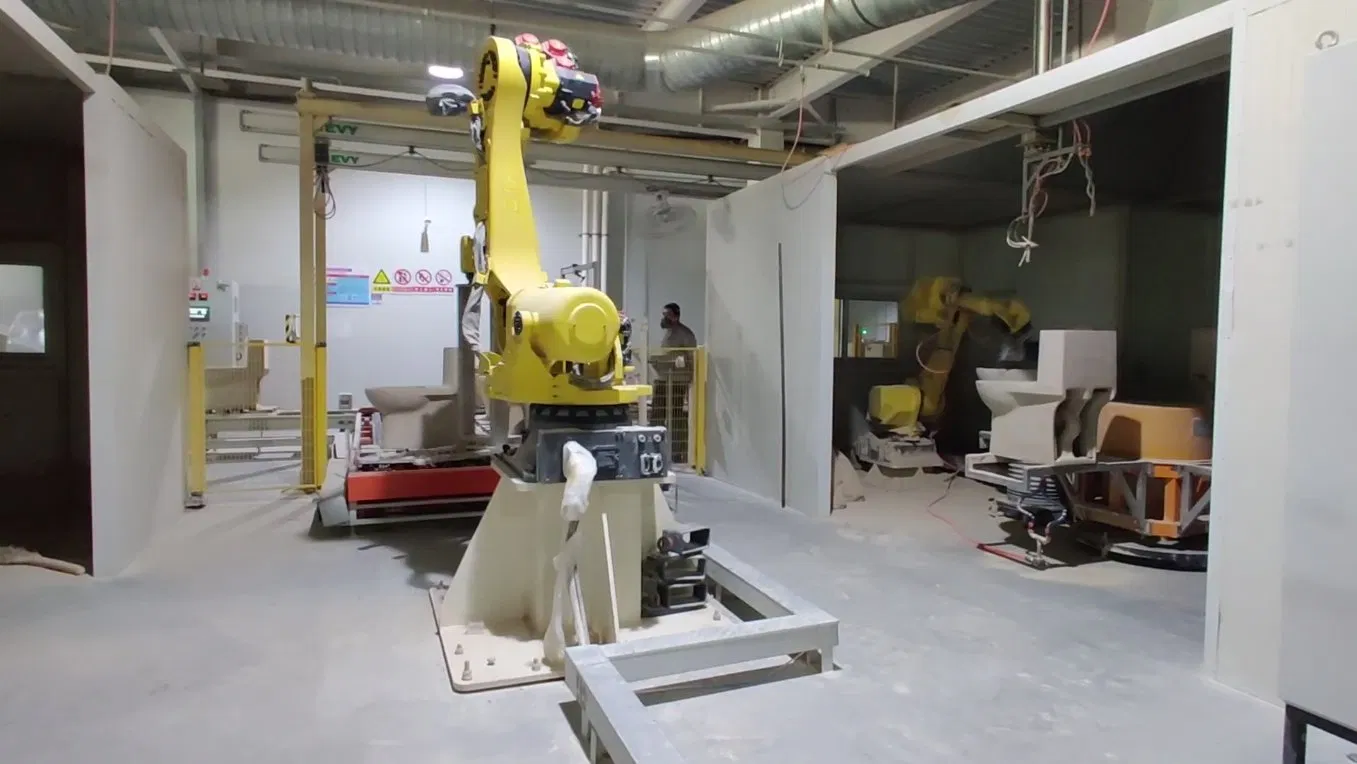
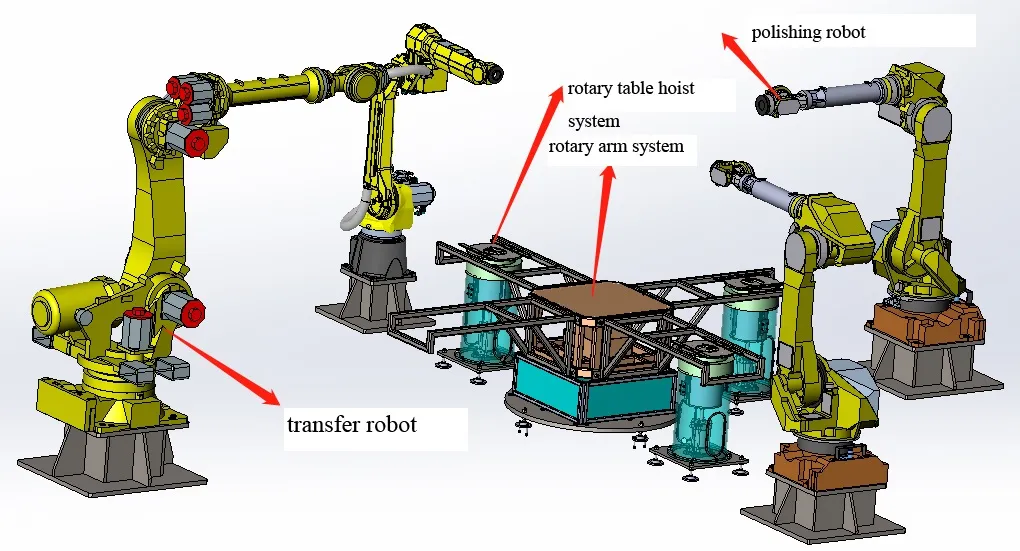
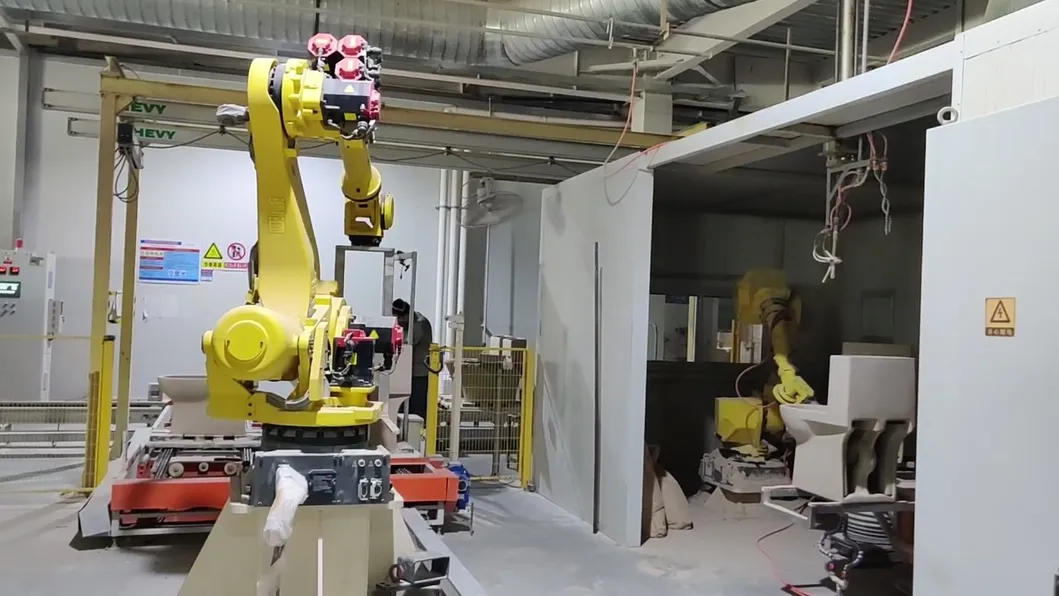
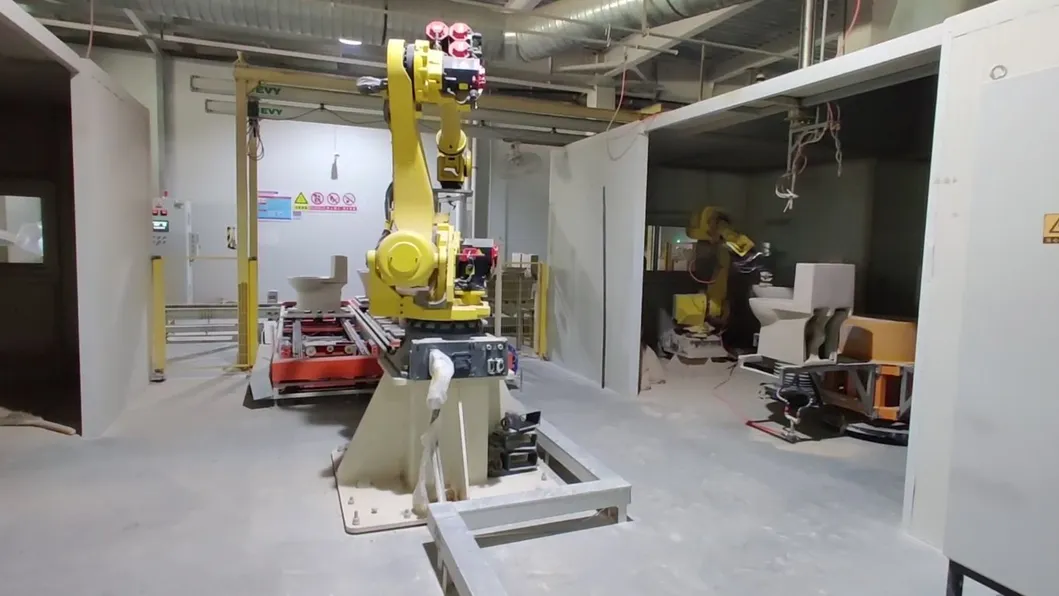
The robot body grinding workstation utilizes automated grinding to eliminate the uncertainties of manual contact. It improves grinding efficiency while reducing occupational hazards. This integrated workstation combines three-station grinding and transporting, significantly reducing labor costs and enhancing production efficiency.



| Section Name | Remark |
|---|---|
| Rotary table systems | 4 work units, servo drive |
| Rotary table hoist systems | Anti-dust cover, SMC cylinder, FANUC servo motor + Japan NABTESCO reducer, Japan THK linear guideway |
| Pneumatic control systems | SMC components |
| Robot body systems | FANUC robot body |
| De-dust systems | Cloth bag de-dust type |
| Electrical control systems | SIEMENS PLC |
| Grinding head | Intelligent floating grinding head, force/displacement/tilt sensors, auto compensation, anti-water/dust design |
| Safety protection device | Safety light curtain and default alarm device |
| Transfer Robot (FANUC R-2000ic/210L) | |
| Rotation Radius | 2655mm |
| Carrying Weight | 210KG |
| Repeated Positioning Accuracy | ±0.2mm |
| Polishing Work Units (FANUC M-710ic & M-20ia) | |
| Rotation Radius | 1813mm - 2050mm |
| Max. Running Speed | 2000mm/s - 4000mm/s |
| Repeated Positioning Accuracy | ±0.07mm - ±0.08mm |
| Grinding Head Specifications | |
| Constant Force Range | 5-150N |
| Constant Force Change | ±2N |
| Displacement Sensor Accuracy | 0.01mm |
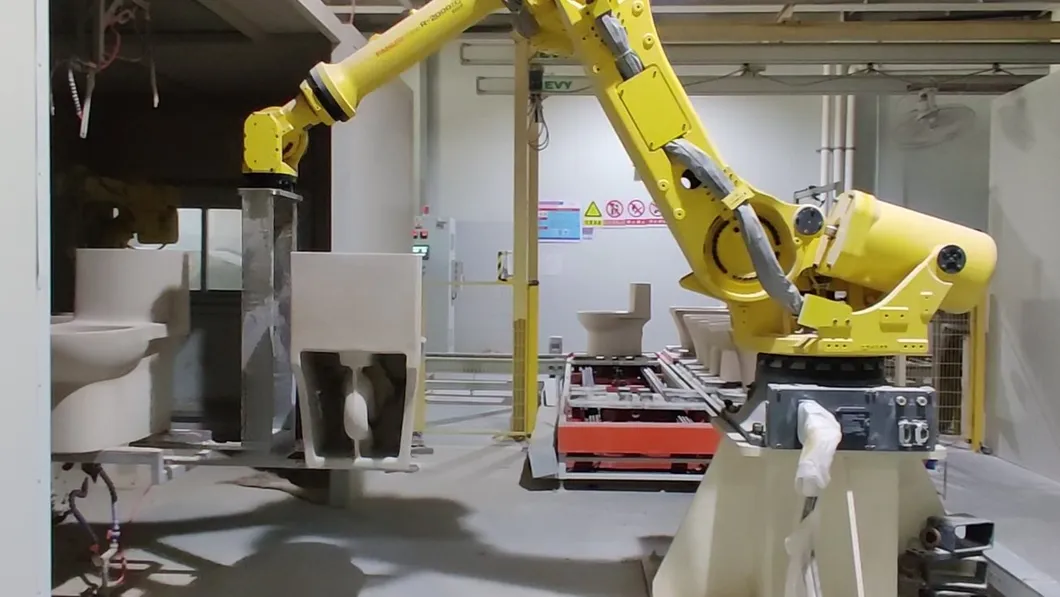
1. Handling Status: The transport robot (R4) moves the pre-booked ceramic body from the line to the turntable position 0.
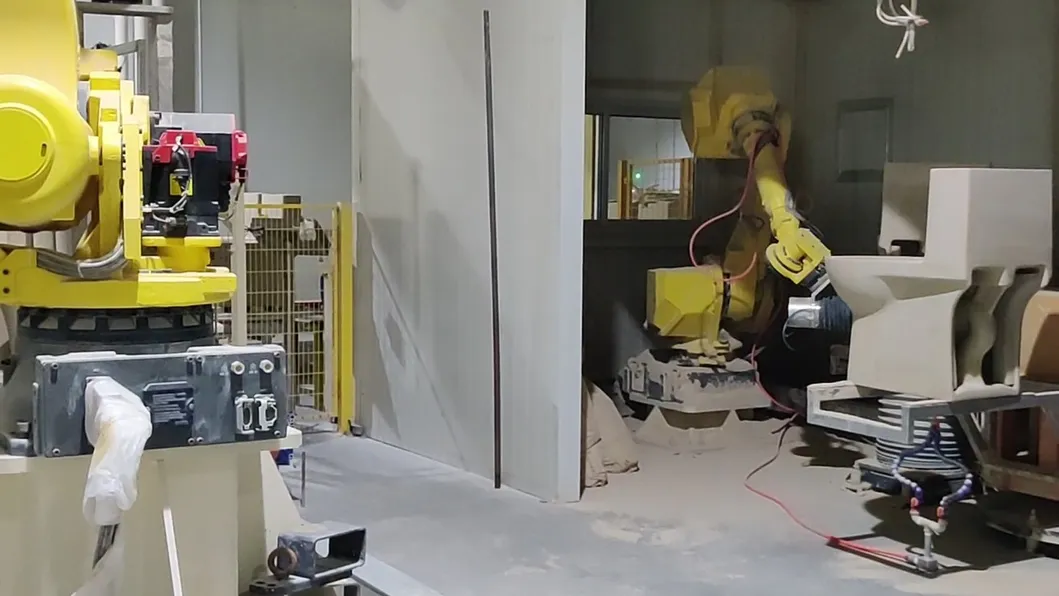
2. Polishing State: The turntable rotates 90° to the polishing robot stations. Three stations perform simultaneous polishing based on programmed instructions.
3. Offline State: Once the 270° rotation and polishing are complete, the handling robot executes the blanking operation to move the product off the assembly line.
4. Pneumatic System: Controls the grinding head and cylinders via solenoid valves, ensuring precise pressure for optimal polishing steps.
| Working Time | 9 Hours per shift |
| Output | 800 - 1400 Pieces per shift |
| Sample Type | 1-piece toilet / 2 module type |